pyGOAP - .3
basic implimentation of goap planning.

Leif Theden
(bitcraft)
goap is: Goal Oriented Action Planning
goap tries to make virtual character come alive through planning. behaviors are programmed, but they don't have to be explicitly linked. action planning is done at run time using the a*star pathfinding algorithm.
pyGOAP v.4
The main concept of GOAP is that AI is not a static table or set of states. Rather, GOAP uses a A* like search to find solutions to goals at runtime. This frees the designer of setting up complex behavior trees.
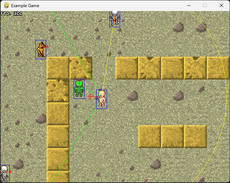
There is a test called pirate.py. It more-or-less test/demos the GOAP library. You should be able to run the pirate demo and watch how he satisfies his goal: getting drunk.
Check out the source comments and also the tutorial.

Changes
New Version!
New changes bring new possibilities. Actions and goals can now be generated and modified at runtime. Because of this, the planner is much more flexible and able to handle more situations.
This is a simple map that shows where the objects are in the environment, although there needs a lot of work to get it to be more meaningful.
I am releasing this now, although it is not finished. Planning works pretty well, but the actions are not complete. If you are interested in this project, please send me an email at leif.theden [at] gmail.com.
Feel free to run the simulation and read the output. Many of the modules can output more debugging information by changing DEBUG to 1 at the top of the module.

Links
- Home Page
- https://github.com/bitcraft/pygoap
- Source
- https://github.com/bitcraft/pygoap
Releases
Pygame.org account Comments
Recent Releases
 SUPER JUMP DUDE - 0.6.3
1 Jun, 2026
SUPER JUMP DUDE - 0.6.3
1 Jun, 2026
 Imperial Ambitions - Three Kingdoms - 1.0
19 Mar, 2026
Imperial Ambitions - Three Kingdoms - 1.0
19 Mar, 2026
 Pygame menu - 4.5.4
19 Feb, 2026
Pygame menu - 4.5.4
19 Feb, 2026
 pgRPG - ECS pygame Game Engine - 0.1.0
4 Feb, 2026
pgRPG - ECS pygame Game Engine - 0.1.0
4 Feb, 2026
 AS Arrow - v 0.1.4
28 Jan, 2026
AS Arrow - v 0.1.4
28 Jan, 2026
 koxinga - v0.3.3
27 Jan, 2026
koxinga - v0.3.3
27 Jan, 2026
 PyDPainter - Release 2.2.1
21 Jan, 2026
PyDPainter - Release 2.2.1
21 Jan, 2026
 Trosnoth - 1.23.0
18 Jan, 2026
Trosnoth - 1.23.0
18 Jan, 2026
 Royal Ordains - 0.2.4
5 Jan, 2026
Royal Ordains - 0.2.4
5 Jan, 2026
 Divide & Conquer - 1.0
Divide & Conquer - 1.0
ALL the tags!